


![]()

-
뉴스
-

- OOCL Orders Twelve 13,600TEU Class LNG Dual-Fuel Co...
- Orient Overseas Container Line Ltd. (OOCL) announced the order of twelve 13,600 TEU class LNG dual-fuel container vessels, marking another important step forward in the Company's efforts to advance low?carbon shipping and energy transition. OOCL entered into the re...
-

- KR Drives IMO's Marine Environmental Agenda on Ammo...
- Korean Register (KR) announced that it is serving as the Coordinator of two International Maritime Organization (IMO) expert groups in key marine environmental areas: ammonia effluent management and response procedures for nitrogen oxides (NOx) reduction strategy failu...
-

- Gebrüder Weiss Supports woom’s European Logistic...
- Demand for bicycles across Europe rises sharply within a small window each spring. For manufacturers and retailers alike, timely product availability is critical during this peak season. To reliably manage these seasonal surges, international children’s and youth bic...
-

- Ulsan Port Successfully Completes World’s First A...
- The Ulsan Port Authority (UPA) announced the successful completion of the world’s first ammonia bunkering operation for an ammonia dual-fuel gas carrier at Ulsan Port on April 23, 2026. This milestone builds on Ulsan Port’s earlier achievements, including the world...
-
- 운항스케줄
-
오피니언









































2016-01-13 09:31
차세대 운송수단 '트랜스휠' 컨테이너 나른다 
외바퀴 운송 형태로 화물적재, 수취인 식별 등 가능
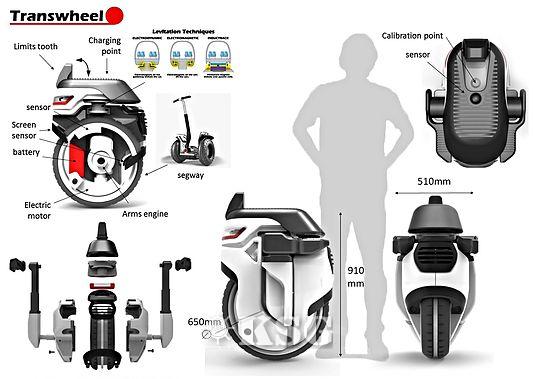
외바퀴 모터사이클 형태의 운송용 드론이 차세대 운송수단으로 관심을 끌고 있다.
로이터 등 외신에 따르면 이스라엘 대학생 코비 시카(Kobi Shikar)는 ‘트랜스휠(Transwheel Delivery Drone)’로 불리는 새로운 형태의 운송수단을 개발했다. 외바퀴 운송용 로봇인 트랜스휠은 자동 화물적재, 자율주행, 수취인 식별, 협업주행 등이 가능한 신개념 운송수단이다.
트랜스휠은 GPS로 경로를 탐색하고 카메라로 장애물을 인식해 최적의 동선을 실시간으로 파악하며, 세그웨이(Segway)와 유사한 방식으로 균형을 유지한다. 바퀴 양쪽에 설치된 로봇 팔은 화물을 싣고 내리며, 화물 고정대 역할을 한다. 또 화물 없이 달릴 때는 동체 슬롯에 삽입돼 공기저항을 최소화한다. 목적지에 도착한 뒤에는 인터넷 연결형 카메라를 통해 사람의 얼굴을 촬영하고, 수취인의 SNS 프로필 등과 대조해 본인 여부를 확인한다.
특히 트랜스휠은 다수의 기기가 협업 주행하기 용이한 형태로 설계돼 컨테이너와 같은 대형화물 운송에 활용될 가능성도 있다. 또 공중이 아닌, 지상에서 운송되기 때문에 항공 관련 규제로부터 자유롭다. 더구나 배터리 방식을 택해 온실가스 배출에 대한 부담도 없다.
트랜스휠 설계자인 코비 시카는 “지상형 드론은 기술적으로 충분히 구현이 가능하고 활용가치가 높다”며 상용화를 위한 투자유치를 기대했다.
< 김동민 기자 dmkim@ksg.co.kr >

선박운항스케줄
인기 스케줄
-
GWANGYANG
 CHENNAI
CHENNAI선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Esl Kabir 06/09 06/30 ESL Ever Vista 06/10 07/02 Evergreen Ever Conform 06/12 07/11 Evergreen -
BUSAN
XINGANG선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Easline Yantai 05/24 05/26 Pan Con Sunny Clover 05/25 05/28 KMTC Sawasdee Shanghai 05/26 05/29 Heung-A -
INCHEON
VANCOUVER B.C.선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent TBN-SIC 06/20 07/07 SIC TBN-SIC 08/20 09/07 SIC -
BUSAN
VANCOUVER B.C.선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Hmm Vancouver 05/27 06/09 HMM Ym Wealth 06/03 06/15 HMM Ym Mobility 06/10 06/23 HMM -
BUSAN
TORONTO선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Westwood Rainier 06/13 07/10 Hyopwoon Lautoka Chief 06/19 07/17 Hyopwoon Westwood Columbia 06/27 07/24 Hyopwoon
- 출발항
-
- 도착항
-







많이 본 기사
- 세인티앤엘, 수도권 특수물류센터 가동…위험물 수요 타깃한중카페리 잇따른 항로중단에 체감시황 호조호르무즈해협 빠져나온 HMM 유조선 아라비아해 진입31회 바다의날 기념식 27일 국립한국해양대서 열려‘선가·환율 쌍끌이’ 중견조선 지난해 영업익 2조 육박…2배↑MSC, 북미항로 유가할증료 조정…서안↓ 동안↑벌크선 시장 숨고르기…全 선형서 일제히 내림세‘선원기금 지원효과’ 외항선박에 스타링크 도입 확산中 코스코, 운임 하락에도 1분기 영업익 1.5조 달성해양진흥공사, 국적선사 영업실적·선박금융 DB 공개 예고
- 英 웨스트P&I, 비상준비금 3.7억弗…23%↑ECU월드와이드코리아, ‘신항 물류현장 견학’ 워크숍 실시여수·광양항 1분기 컨물동량 0.2% 증가한화오션, MS·구글등과 인공지능 기반 함정 기술 논의롯데글로벌로지스, 베트남 동나이 콜드체인 센터 가동대한항공, 통합 출범 앞두고 노사합동 안전보건점검울산항만공사, 日 나고야·고베·니가타서 화물 유치 박차부산항 시설물 긴급유지보수 업체 44개사 모집여수해수청, 항만안전문화주간 운영4대 항만공사, 항만시설 유지관리 실무 워크숍 개최



해사물류 통계 ![]()


COPYRIGHTⓒ 2014 KOREA SHIPPING GAZETTE. ALL RIGHTS RESERVED.
COPYRIGHTⓒ 2015
KOREA SHIPPING GAZETTE. ALL RIGHTS RESERVED.
0/250
확인