


![]()

-
뉴스
-

- Union Minister Sonowal Unveils Maersk’s First Ind...
- A.P. Moller – Maersk, the world's leading integrated shipping and logistics company, today achieved a historic milestone in India's maritime sector by becoming the first international shipping line to procure an export-import (EXIM) shipping container man...
-

- OOCL Wisdom Completes First Green Methanol Bunkerin...
- ?Orient Overseas Container Line Ltd. (OOCL)'s first methanol dual-fuel containership, OOCL Wisdom, today completed its first green methanol bunkering and commenced its maiden voyage at Qingdao Port, marking another milestone in the company's fleet development a...
-

- WinGD secures engine order for 12-vessel VLCC newbu...
- Swiss marine power company WinGD has secured an order to supply main engines for a series of 12 Very Large Crude Carriers (VLCCs) being built at Hudong-Zhonghua Shipbuilding, China, for Dynacom, supporting the delivery of a new generation of efficient, reliable and reg...
-

- Interasia Names 7000TEU Containership to Strengthen...
- Interasia Lines held the naming ceremony for our new 7,000 TEU containership, “Interasia Ambition,” on June 18 at Shanghai Waigaoqiao Shipbuilding Co., Ltd. The ceremony was jointly hosted by Mr. Jeff Lo, Executive Vice President of Interasia Lines, and Mr. Zhang W...
-
- 운항스케줄
-
오피니언







































2015-12-24 11:14
물류창고에서 로봇이 인력을 대체? '글쎄'
아직까지 보완재로서의 성격 강해
최근들어 물류창고에 속속 도입되고 있는 로봇이 인력을 대체하기보다는 보완재로서의 성격이 강하다는 주장이 나왔다.
외신 및 물류기술연구센터에 따르면 아마존 등 세계적인 온·오프라인 유통업체들이 물류창고에 각종 로봇 애플리케이션을 도입하고 있으며 로봇과 관련기술의 발달로 로봇 도입환경도 개선되고 있다.
그러나 현재로서는 로봇을 인력의 대체재가 아닌 보완재로 여기는 편이 물류창고 운영사입장에서 현실적으로 타당하다는 게 업계 전문가들의 조언이다.
로봇 자체의 기술적 고도화와 더불어 기업들이 창고 내에서 이미 상당수의 로봇을 도입하고 있다. 그러나 로봇은 인간만큼의 업무 유연성을 담보할 수 없기 때문에 돌발 상황이나 예외적인 상황이 끊임없이 발생하는 물류 현장에서 인력을 완벽하게 대체할 것이라고 보기는 어렵다.
이에 대해 물류 업계 전문가들은 "물류창고의 로봇은 개별 공정의 인력을 대체하는 것이 아니라 인력을 보완하면서 업무 효율을 개선하는 데 의의가 있다"고 설명했다.
물류현장에 다양한 로봇 등장
각종 로봇 관련 기술의 급격한 발전을 배경으로 물류 현장에 어떤 형태로든 로봇 애플리케이션을 도입하는 사례가 최근 늘고 있다.
비전시스템(vision system), 그리퍼(gripper), 내비게이션 솔루션, 제어 소프트웨어 등 로봇 관련 요소들이 나란히 발전하면서 과거에는 단지 상상으로만 가능했던 다양한 로봇들이 속속 개발되고 있다.
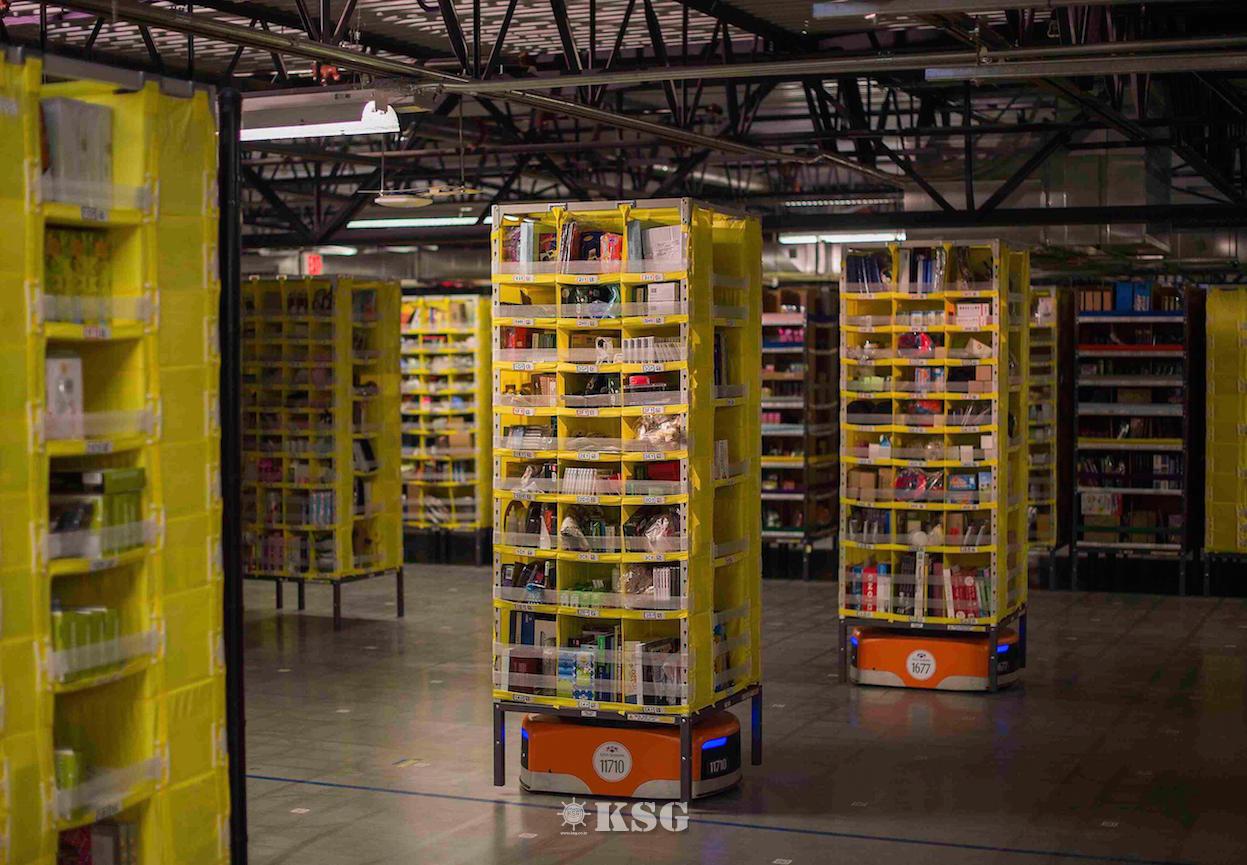
대표적으로 美 최대 전자상거래 업체 아마존(Amazon)은 머티리얼 핸들링로봇을 개발하는 키바(Kiva Systems)사를 2012년 7억7500만 달러에 인수하고 선반 운반용 로봇을 자사 물류창고에 실제 배치했다.
이 로봇은 주문이 들어온 상품이 보관된 선반 자체를 사람에게 운반해 신속한 피킹을 지원하는 자율주행 로봇으로, 캘리포니아 물류창고 한 곳에만 1500대 이상이 배치돼 있다.
아울러 아마존은 제품 포장을 위한 로봇 팔도 병용해 사람이 하려면 몇 시간이 걸리는 작업을 30분 내에 마무리하게 됐다고 발표한 바 있다.
산업 현장에 로봇을 도입하려면 그에 적합한 환경이 조성돼야 하는데, 커넥티드 기술이 확산된 오늘날의 물류센터는 로봇 도입에 필요한 주변 요소를 이미 상당 수 갖췄거나 갖출 수 있는 경우가 많다.
이에 대해 산업 자동화 솔루션 벤더 쉐퍼 시스템(Schaefer Systems)사의 맨프레드 프레이스(Manfred Preiss) 영업부문 부사장은 "지금까지 다수 확보한 ‘부품’들을 어떻게 조합해 나갈지가 관건"이라고 언급했다.
물류센터 내의 장비 고도화는 지금도 계속 진행 중이어서 앞으로 각종 로봇 애플리케이션의 도입 난이도는 더욱 낮아질 것으로 예상된다.
로봇도입을 고려하는 물류창고 운영사가 계속 늘어나는 배경에는 인건비 부담 외에도 양질의 인력을 적시에 수급하기 어려운 인력시장의 현실이다.
이에 대해 맨프레드 부사장은 "최근 전자상거래 주문의 35%~55%가 한개짜리 주문이라 수작업 시 번잡할 수밖에 없다"며 "이런 작업을 숙련되지 않은 인력만으로 오류 없이 수행하기란 매우 어렵다"고 강조했다.
로봇의 인력 대체 '시기상조'
로봇 자체의 기술적 성숙도와 도입 환경이 종전보다 나아졌다고는 하나 로봇이 인력을 온전히 대체할 수 있는 영역은 아직 넓지 않다.
단적으로 피스 피킹(piece picking) 로봇의 경우, 작업의 일관성과 예측가능성 측면에서만 우수할 뿐 작업 속도, 의사결정 유연성, 다양한 상황에서의 제품 식별력 등 여러 측면에서 아직 인간을 능가하지 못한다.
그리고 이 같은 로봇의 상대적 경직성은 예측 불가능한 상황이 자주 발생하는 전자상거래 물류 현장에서는 약점으로 작용할 수밖에 없다.
따라서 현재로서는 인력을 완전히 대체하는 용도가 아니라 개별 공정의 효율을 개선하는 차원에서 많은 경우 인력의 보완재 수준으로 로봇 도입을 고려하는 것이 타당하다고 로봇 업계 전문가들은 조언하고 있다.
예를 들어 창고자동화설비(AR/RS)를 도입하기 어려운 곳에서는 모바일 피킹로봇과 사람을 같은 공간에 배치함으로써 기존 시설의 큰 변경 없이 업무 효율을 높이는 게 현실적인 대안이 될 수 있다.
또 입고 시 레이블링 작업에 로봇을 투입할 경우, 사람은 하차 작업과동시에 상품 종류를 확인하고 로봇은 그에 따라 레이블링만 담당하는 식으로 업무를 분할하면 입고에 투입되는 인력을 줄일 수 있다.
일례로 쉐퍼시스템의 한 고객사는 포켓소터(pocket sorter)에 피스 피킹용 고정식 로봇을 배치해 전체 SKU(Stock Keeping Unit)의 90%를 로봇이 처리하고 나머지 10%만 사람이 직접 다루는 식으로 전자상거래 시대에 대응하고 있다.
이는 해당 업체가 사람의 실질적인 업무 부하는 늘리지 않으면서, 종전보다 10배나 많은 주문을 처리할 수 있게 됐음을 의미한다.
이와 관련해 창고자동화 솔루션 업체 인텔리그레이티드(Intelligrated)사 관계자는 "단순히 특정 영역의 자동화보다는 사람이 계속 근무하면서도 종전 보다 업무효율을 높이는 데 초점을 두어야 한다"고 지적했다.
단 이처럼 로봇이 사람의 대체재가 아니라 보완재로 활용되는 현실은 로봇 자체의 하드웨어 설계에도 제약으로 작용하는 측면이 있다.
예를 들어 창고용 모바일 로봇의 경우, 우수한 자체 프로세싱 성능과 긴 배터리 수명을 확보해야 하고, 출력 및 크기는 주변 사람에 위협이 되지 않는 수준으로 제한돼야 한다.
로봇 진화의 최대 관건은 소프트웨어
로봇의 하드웨어가 아무리 발전한다고 해도, 정작 이를 지원하고 제어할 소프트웨어가 미비하다면 로봇에게 복잡한 업무를 기대하기는 어렵다.
이와 관련해 로봇 전문업체 와인라이트(Wynright)사의 제어시스템 부문 부사장인 알프레도 발라데즈(Alfredo Valadez)는 "하드웨어를 만드는 일과 그것을 제어하는 일은 서로 완전히 별개의 성격"이라고 강조했다.
예를 들어 "기존 창고관리시스템으로는 모바일 로봇의 운행관제조차 불가능한데, 수백 대의 로봇들을 한 창고 안에서 서로 엉키지 않게 운용하는 것은 대단히 복잡한 일"이라는 것이 알프레도 부사장의 설명이다.
로봇의 경직성 역시 개선돼야 할 부분이다.
일례로 패킹로봇이 인간과 비슷한 몫을 해내려면 평평한 선반만이 아니라플로우랙이나 파렛트에 있는 상품도 다룰 수 있어야 한다.
아울러 로봇의 자체 지능과 별개로, 동작인식 컨트롤 같은 최신 인터페이스를 통해 인간의 판단을 로봇에 신속히 개입시키는 보완책 역시 로봇의 유연성 부족을 일부 해소하는 차원에서 고려될 여지가 있다.
< 배종완 기자 jwbae@ksg.co.kr >

선박운항스케줄
인기 스케줄
-
BUSAN
 ROTTERDAM
ROTTERDAM선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Ym Throne 08/03 09/22 Tongjin Ym Throne 08/03 09/22 Tongjin One Trust 08/04 09/12 MSC Korea -
BUSAN
MALE선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Oocl Singapore 08/05 09/04 KBA -
BUSAN
KARACHI선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Jira Bhum 07/27 08/21 BEN LINE Jira Bhum 07/27 08/21 Heung-A Hemma Bhum 07/31 08/23 Sinokor -
BUSAN
JEBEL ALI선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent One Maestro 07/28 08/31 BEN LINE Herta 08/03 08/25 KWANHAE SHIPPING Herta 08/03 08/27 Tongjin -
INCHEON
JEBEL ALI선박운항스케줄 목록 - 선박운항스케줄목록으로 Vessel, D-Date, A-Date, Agent를 나타내는 테이블입니다. Vessel D-Date A-Date Agent Pegasus Unix 08/01 09/01 ESL Pancon Glory 08/05 09/11 ESL Msc Magnolia V 08/07 09/12 MSC Korea
- 출발항
-
- 도착항
-




많이 본 기사
- HMM, 美 서안 ‘컨’ 터미널 年 처리능력 88만TEU로 확대북미항로/ ‘수요둔화 대응’ HMM·코스코, 내달 운임회복 시동중남미항로/ 파나마운하 수심 제한에 CMA-CGM 할증료 부과 추진팬스타, SIPG와 부산-상하이 카페리항로 개척 ‘맞손’호주항로/ 선복난 심화…한국발 해상운임 46% 급등구주항로/ 신조 초대형선 투입에도 高운임 유지아프리카항로/ 운임시장 ‘순풍’…전반적 호조세中 하이난 자유무역항, 올해 5개월간 국제무역총액 전년比 54%↑HJ중공업, 여자프로 골프단 창단…스포츠 마케팅 강화[표] 주간 중고선 가격동향
- 국제물류사업협동조합 설립…원제철 초대 이사장 선출英 웨스트P&I, 올해 보험료 수입 6600억 전망…10%↑울산항만공사, 안동지역 수해 피해 260가구에 물품 지원CJ대한통운-환경공단, AI 적정포장 검증체계 구축인사/ 해양수산부판례/ “부서진 배도 약속한 항구까지 돌아가야 할까?”[표] 주간 중고선 가격지수YGPA, 글로벌 선사 대상 여수항 크루즈 유치전해수부, 상반기 민간 항만개발사업 2523억 유치한국컨테이너풀, 농수산물 온라인도매시장 수도권 물류센터 운영


스케줄 많이 검색한 항구

해사물류 통계 ![]()


COPYRIGHTⓒ 2014 KOREA SHIPPING GAZETTE. ALL RIGHTS RESERVED.
COPYRIGHTⓒ 2015
KOREA SHIPPING GAZETTE. ALL RIGHTS RESERVED.
0/250
확인